ISME is a partner of EUMarineRobots, the Marine robotics research infrastructure network
Our oceans are the least-explored region of planet Earth. Protection and sustainable development of ocean resources presents formidable challenges. Robots will play an increasingly key role in the near future and this role will expand and become more challenging as we extend into deeper, remote and hostile marine environments. Europe leads in many aspects of maritime, but lacks well integrated and coordinated oceanic robotic infrastructure or presence.
The marine-robotics industry is growing rapidly. It is a crucial high-value/high-cost sector with considerable entry barriers to R&D. The full growth potential of this industry will be greatly enhanced with access to shared robotic research infrastructure.
EUMarineRobots (EUMR) proposes an access-infrastructure for the deployment of a full-range of aerial, surface and sub-surface marine robotic assets, the combined value of which is far greater than the sum of their parts. EUMR will open transnational access to significant national marine robotics R&D assets across Europe.
ISME is a partner of the network with the following infrastructures

Typhoon vehicle is a middle-sized class AUV, whose features are comparable with other existing vehicles, such as Remus series from Kongsberg. Considering the vehicle sizes (length of 3600 mm, external diameter of 350 mm, weight of 130-180 kg according to the carried payload) and the expected performances (maximum reachable depth of about 300 m, at least 10-12 hours of autonomy and a maximum speed of 5-6 knots) the vehicle can be considered an intermediate one compared to the smaller Remus 100 and the bigger Remus 600. Typhoon presents some innovative features which greatly contribute to reduce production and maintenance costs:
- The extended use of low cost corrosion resistant materials: thanks to the use of composite material such as fibreglass, the production cost of the hull is quite low. Also the maintenance is quite simple;
- Modular mechanical design with commercial components: the use of low cost commercial Lithium-Polymer batteries usually used for ground racing vehicles contributes to reduce the costs. The actuators and the propellers of the propulsion system are completely modular and interchangeable. Both propulsion, and manoeuvring thrusters are actuated with the same motor and drive system: a standard actuation unit with a 200 W brushless motor and drive directly fed by the 48 V provided by the batteries and controlled through an industrial CAN bus. The same actuation system can also be used to control movable navigation surfaces like rudders and fins, resulting in a highly customizable actuation system. The calibration of the pitch static attitude can also be performed moving the accumulators whose axial position is controlled by a screw system;
- Extended use of fast prototyping techniques: the vehicle is easy customizable since many components and accessories are built using ABS plastic material, shaped using 3D printers. This way, many components may be easily customized and rebuilt in few hours. Moreover, the prototyping techniques have greatly accelerated the production of the components.

AUV, 120m depth rated, equipped with M900-130 BlueView; Multibeam - 900 kHz Frequency and 130 deg Field of View

The Fòlaga design has focused on the observation that a vehicle performing mesoscale ocean measures in shallow coastal waters has to exhibit a mixture of gliders and AUVs capabilities. In particular, it is allowed to navigate on the surface for most of the time, and it has to dive, possibly vertically, at the selected measurement locations.
The Fòlaga carries a CTD (conductivity, temperature,depth) sensor as payload, and, when on surface, it maintains contact with a surface station through a GSM telephone link. The link is used to transmit the current vehicle position and the oceanographic data (once re-surfaced). It can be used from the surface station to reprogram on-line the vehicle mission or for remote control by acting directly on the vehicle propulsors. In this last case, the Fòlaga is turned into an untethered remotely controlled vehicle
The vehicle is composed by two cylindrical fiberglass sections, connected at the center, for a total length of about 3m, and 0,12m diameter. The two-sections design allows for easy transportation, while the resulting elongated and thin shape, together with two vertical fins located at stern and bow, guarantees good track-keeping performance. Inside the cylinders, the electronic package and the battery power packages are hosted. The Fòlaga is powered by lead acid batteries guaranteeing 8 hours of autonomy. The propulsion is obtained through jet flow pumps. The second vehicle version has six pumps, two for horizontal propulsion (at the stern), two for vertical propulsion (at bow and stern respectively) and two lateral propulsors for steering purpose, located at the vehicle bow, that allow the vehicle to turn even at zero surge velocity.

ASV, approx 3x2 m
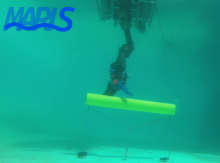
7DOF underwater arm

With over 3,600 lumens of efficient and powerful LED (Light Emitting Diode) lighting, the VideoRay Pro 4 submersible is capable of illuminating even the darkest of environments.
The forward light reflectors have been engineered to distribute the light evenly throughout the camera tilt range, making lights that "track" the camera unnecessary. The two LED arrays are positioned outside the main pressure hull to provide the greatest separation from the camera. This distance is key to minimizing back-scatter, or the reflection of waves, particles, or signals that can cloud the underwater camera.
The combination of camera and lighting on the VideoRay Pro 4 will produce impressive video quality in a variety of water conditions. With the VideoRay Pro 4 you never worry about your lighting "burning out" or even changing a bulb

SeaLab is a research laboratory located inside a miltary area of Italian Navy. Access to SeaLab of civilian personnel therefore requires previous authorization from Italian Navy, and compliance with internal existing regulations within the Navy base